

发那科机器人用户坐标系的设置与使用 (三点示教法)
声明:本媒体部分图片、文章来源于网络
版权归原作者所有,如有侵权,请与我联系删除。
三点示教法
激活所需工具坐标系后示教记录3个点,即坐标系的原点、X轴方向的一点、XY平面上的一点。

步骤
1.按下 [MENU] (菜单)键,显示出画面菜单

2.选择“ 设定 ”,光标右移选择 “ 坐标系 ”
3.按下F3“坐标”
4.选择“用户坐标系”。出现用户坐标系一览画面

5.将光标指向将要设定的用户坐标系号码所在行
6.按下F2 “详细”。出现所选的坐标系号码的用户坐标系设定画面
7.按下F2 “方法”。选择“三点法”
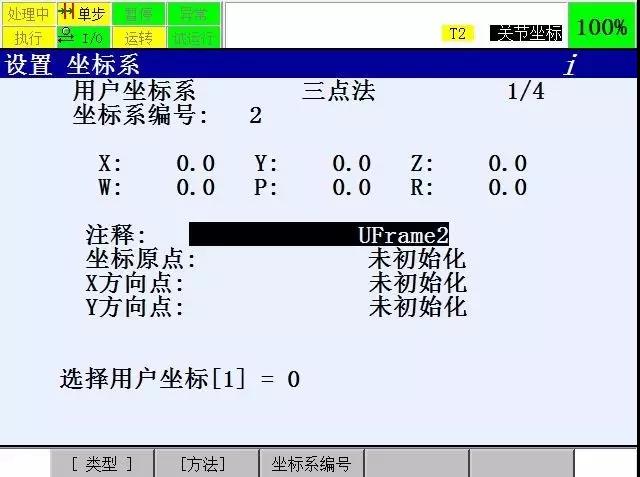
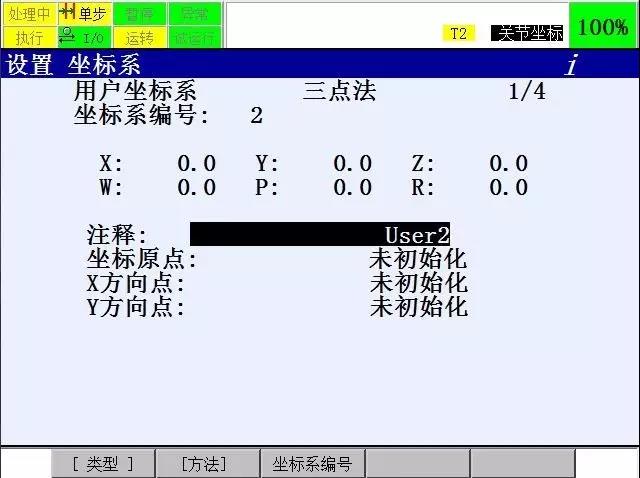
8.输入注释
a.将光标移动到注释行,按下ENTER(输入)键
b.选择使用单词、英文字母
c.按下适当的功能键,输入注释
d.注释输入完后,按下 ENTER 键
9.输入用户坐标系的坐标值
a.将光标移动到各条目
b.通过数值键设定新的数值
c.按下 ENTER 键,输入新的数值
10.记录Orient Origin Point(坐标原点)
a.光标移至Orient Origin Point(坐标原点)按 【SHIFT】+F5 【RECORD】 (位置记录)记录
b.当记录完成,UNINIT(未初始化)变成 RECORDED(记录完成)
11.记录X方向点
a.示教机器人沿用户自己需要的 +X方向至少移动250mm
b.光标移至 X Direction Point (X轴方向)行,按【SHIFT】+F5 【RECORD】(位置记录)记录
c.记录完成,UNINIT(未示教)变为RECORDED(记录完成)
d.移动光标到Orient Origin Point(坐标原点)
e.按【SHIFT】+【F4 MOVE_TO】(位置移动) 使示教点回到Orient Origin Point(坐标原点)
12.记录Y方向点
a.示教机器人沿用户自己需要的+Y方向至少移动250mm
b.光标移至 Y Direction Point (Y轴方向)行,按【SHIFT】+F5 【RECORD】(位置记录)记录
c.记录完成,UNINIT(未初始化)变为USED(已使用)

13.按下PREV(返回)键,显示用户坐标系一览画面。可以确认所有用户坐标系的设定值

14.要将所设定的用户坐标系作为当前有效的用户坐标系来使用,按下F5 “切换”,并输入坐标系号码
注意:
1.若不按下 F5 “切换”,所设定的坐标系就不会有效
2.也可以使用SHIFT + COORD来选择需要使用的坐标系号码
15.要清除所设定的坐标系数据,按下F4 “清除”