

发那科机器人集成之定制化软件!!!
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除。
iR PickTool 是对传送带上的工件使用相机或光电传感器等设备进行检测,机器人配合传送带的运动对工件进行动态拾取的定制化软件。
该软件提供了多台机器人共享一条传送带上工件数据信息的应用,支持一台发那科机器人同时对应多条传送带进行跟踪的应用。在iR PickTool软件应用中,机器人可以通过队列管理或视觉跟踪实现对传送带上运动的工件追踪功能。
利用iR PickTool对跟踪系统进行调试,步骤如下:
1.示教用电脑的设定
iR PickTool中,通过电脑对iR PickTool进行设定时,需要对电脑进行设置。在电脑上设置IP地址,确保示教电脑上设置的IP地址与机器人控制器的IP地址在同一网段变更Internet Explorer的设定,将需要连接的机器人控制器的IP地址设置为受信任站点变更Windows防火墙设定,使机器人控制器的通信不被Windows防火墙限制
2.机器人间的通信设定
在使用iR PickTool跟踪时,机器人控制器间会存在大量的信息交换。如果发生通信延迟,会影响系统的性能。因此,机器人间的通信是由机器人控制器间建立的本地网络构成,不会受到其他通信的通信量影响。构建机器人间通信设置时,需要注意以下事项:
IP地址的设定中,需要对各机器人控制器定义不同的机器人名称
3.脉冲编码器的连接和设定
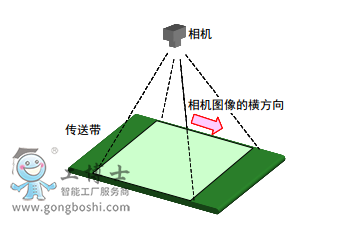
4.相机的连接和设定
5.触针TCP的设定
6.机器人工作单元的设定
7.视觉程序的示教
在进行视觉跟踪时,需要对相机进行设定和标定工作。在完成标定工作后,需要完成视觉程序的示教。
8.机器人程序的示教
9.追踪动作的微调
更多资讯:发那科机器人集成